Easy3DLaserLine
Libreria per l'estrazione e la calibrazione della linea laser 3D
- Estrazione di linee laser singole e doppie in una mappa di profondità
- Calibrazione 3D comoda e potente per configurazioni di triangolazione laser
- Compatibile con i frame grabber Coaxlink Quad 3D-LLE e Coaxlink Quad CXP-12 3D-LLE
Descrizione

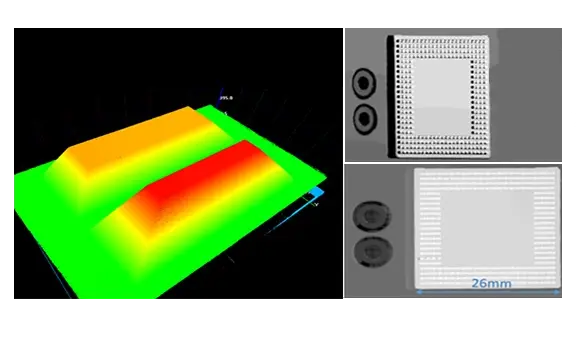
Estrazione della linea laser 3D in una mappa di profondità
Easy3D genera una mappa di profondità da una serie di immagini che contengono una linea laser proiettata sull'oggetto sottoposto a ispezione. Ogni pixel della mappa di profondità risultante contiene la posizione della linea laser nell'immagine. Sono supportate diverse modalità di estrazione e vari filtri. Il software di estrazione delle linee è completamente compatibile con l'implementazione hardware nel frame grabber Coaxlink Quad 3D-LLE.
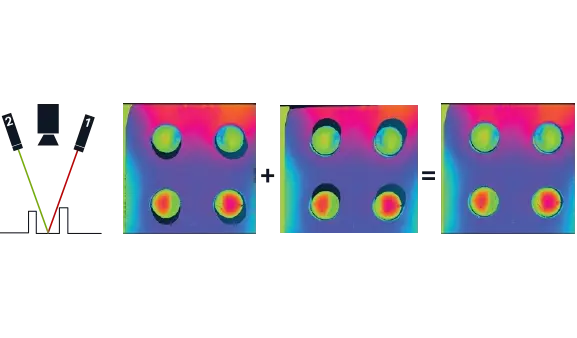
Doppia estrazione della linea laser
Supportato da implementazioni software e hardware, il processo di estrazione a doppia linea laser riduce l'effetto delle occlusioni. Le occlusioni si verificano quando alcune parti degli oggetti non sono illuminate da alcun laser. L'utilizzo di due laser con angoli diversi riduce queste aree indefinite. La calibrazione basata sugli oggetti inclusa in Easy3DLaserLine consente di combinare i dati acquisiti in un'unica nuvola di punti calibrata.
Taratura
Alcune elaborazioni possono essere eseguite direttamente su una mappa di profondità. Tuttavia, la maggior parte delle misurazioni 3D richiede dati e rappresentazioni metriche privi di distorsioni, pertanto è necessaria la calibrazione della configurazione di triangolazione laser. Easy3D calcola un modello di calibrazione applicato alle mappe di profondità per trasformarle in nuvole di punti 3D calibrate. Questo modello di calibrazione si basa sulla mappa di profondità di un oggetto di riferimento, acquisita utilizzando la configurazione di triangolazione laser che richiede la calibrazione.
Altri vantaggi
Sistema di licenze Neo
Neo è il nuovo sistema di licenze. È affidabile, all'avanguardia e ora è disponibile per memorizzare le licenze Open eVision ed eGrabber. Neo consente di scegliere dove attivare le licenze, su un Neo Dongle o in un Neo Software Container. Si acquista una licenza e si decide in un secondo momento.
I Neo Dongle offrono un hardware robusto e la flessibilità di poter essere trasferiti da un computer all'altro. I Neo Software Container non necessitano di hardware dedicato, ma sono collegati al computer su cui sono stati attivati.
Neo viene fornito con il proprio Neo License Manager dedicato, disponibile in due versioni: un'interfaccia grafica intuitiva e facile da usare e un'interfaccia a riga di comando che consente una facile automazione delle procedure di licenza Neo.
Tutte le librerie eVision per Windows e Linux
- Microsoft Windows 11, 10 per architettura processore x86-64 (64 bit)
- Microsoft Windows 11, 10 IoT Enterprise su sistemi x86_64
- Linux per architetture di processori x86-64 (64 bit) e ARMv8-A (64 bit) con versione glibc superiore o uguale a 2.18

Open eVision 3D Studio
Open eVision 3D Studio è lo strumento applicativo di valutazione e prototipazione 3D di Open eVision.
L'applicazione Open eVision 3D Studio semplifica notevolmente la configurazione dei sistemi di ispezione laser lineare 3D singoli e doppi utilizzando il frame grabber Coaxlink Quad 3D-LLE, nonché le librerie Easy3D e Easy3DLaserLine.
Open eVision 3D Studio è gratuito e non richiede alcuna licenza.