簡易影像
影像處理函式庫
- 一套優化的基礎影像處理與分析功能
- 卷積與形態學運算
- 幾何變換
- 直方圖計算與分析
- 雜訊估算與抑制
- HDR(高動態範圍)影像融合
描述
- EasyImage 包含通常作為預處理步驟執行的操作,用以提升影像品質並獲得背景與待檢測物體之間的良好對比度。
- EasyImage 支援灰階與彩色影像處理。部分形態學功能亦針對二值(每像素 1 位元)與雙階影像進行優化。
- EasyImage 內含眾多影像處理功能,例如:透過線性或非線性濾波進行強化與復原、算術與邏輯運算、用於影像配準的幾何變換、用於閾值設定的直方圖分析、投影等。

影像處理函數
- 算術運算:加法、減法、乘法、除法、複製、反轉、模運算、位移
- 邏輯與位元運算:與、或、異或、非
- 增益/偏移調整:歸一化、均勻化、查表映射
- 線性濾波:邊緣檢測(拉普拉斯、梯度、Prewitt、Sobel、Roberts濾波器)、銳化、平滑(高斯與均勻濾波器)。自訂核函數濾波:核函數建立與管理功能
- 非線性濾波:形態運算子(侵蝕、膨脹、開運算、閉運算、細化、增粗、頂帽濾波器、擊錯轉換、形態距離)、中值濾波
- 直方圖均衡化
- 閾值處理:自動閾值、最小殘差法、最大熵法、Isodata法、手動閾值;單閾值(絕對與相對)、雙閾值、基於直方圖的閾值
轉換與提取函數
- 幾何變換:影像配準(對齊)、水平與垂直鏡像翻轉、平移、縮放與旋轉(可選插值)、基於LUT的(去)變形校正
- 向量運算、投影、輪廓採樣(線段、路徑、輪廓)與分析
- 特徵點偵測器:Harris 角點偵測器、Canny 邊緣偵測器
- 雜訊估算與抑制:空間雜訊抑制(卷積、中值濾波器)、時間雜訊抑制(遞迴平均、移動平均、平均)、雜訊估算(均方根雜訊、訊噪比)
- 影像聚焦
- 統計分析:面積測量、二值矩、加權矩、重力中心、像素計數與像素統計、灰階值最小值與最大值、平均值、變異數與標準差
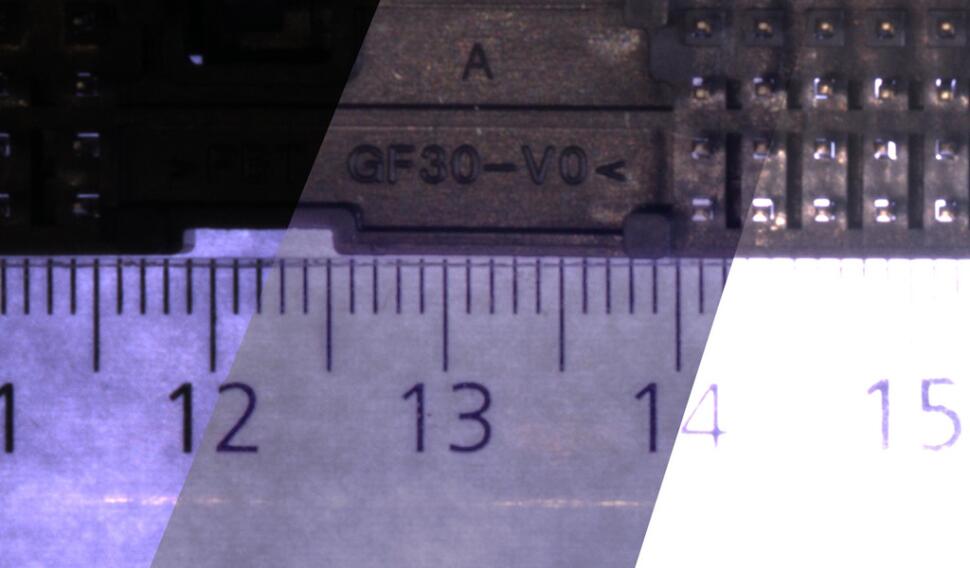
高動態範圍融合
高動態範圍影像融合技術提供多種方法,能將以不同曝光時間拍攝的多張輸入影像合併為單一影像,同時保留原始影像的細節與視覺品質。本技術提供多種合併與色調映射演算法,以涵蓋廣泛的應用情境。
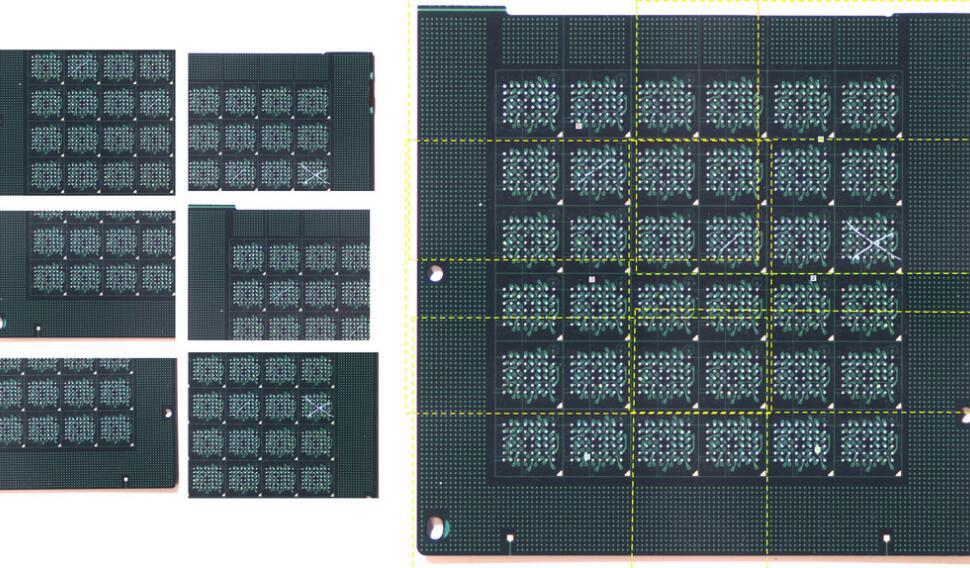
影像拼接
影像拼接是將多張獨立影像組合成更大圖像的過程,藉此呈現物體的完整無縫視圖。EasyImage的影像拼接功能可對經校正的平面物體影像進行拼接,透過影像校正模型消除透視失真與鏡頭畸變。此功能適用於晶圓或印刷電路板的高解析度影像重建。
其他福利
新授權系統
Neo 是全新的授權系統。它具備可靠性與尖端技術,現已可用於儲存 Open eVision 與 eGrabber 的授權。Neo 允許您選擇授權的啟用位置,無論是 Neo 硬體授權卡或 Neo 軟體容器皆可。您先購買授權,後續再決定啟用方式。
Neo 硬體授權器具備堅固耐用的硬體結構,可靈活在不同電腦間轉移使用。Neo 軟體授權容器則無需專用硬體,而是與其啟用所在的電腦綁定。
Neo隨附專屬的Neo授權管理器,提供兩種操作模式:直覺易用的圖形化使用者介面,以及可自動化執行Neo授權流程的命令列介面。
所有適用於 Windows 與 Linux 的 eVision 函式庫
- Microsoft Windows 11、10 適用於 x86-64 (64 位元) 處理器架構
- Microsoft Windows 11、10 IoT Enterprise 適用於 x86_64 系統
- 適用於 x86-64(64 位元)及 ARMv8-A(64 位元)處理器架構的 Linux,需具備 glibc 2.18 或更高版本

開啟eVision Studio
Open eVision Studio 是 Open eVision 的評估、原型設計與開發工具。
其直觀的圖形使用者介面讓您能調用 eVision 的任何 2D 影像處理功能,並立即檢視結果。內建的腳本功能可自動生成對應程式碼,您可直接複製貼上至應用程式中。
Open eVision Studio 完全免費(需搭配 Open eVision 2.0 及以上版本使用),且無需任何授權許可。