Easy3DLaserLine
3Dレーザーライン抽出およびキャリブレーションライブラリ
- シングルおよびデュアルレーザーラインの深度マップへの抽出
- レーザー三角測量システム向けの便利で強力な3Dキャリブレーション
- Coaxlink Quad 3D-LLEおよびCoaxlink Quad CXP-12 3D-LLEフレームグラバーに対応
説明

3Dレーザーラインの深度マップへの抽出
Easy3Dは、検査対象物に投影されたレーザーラインを含む一連の画像から深度マップを生成します。生成された深度マップの各ピクセルは、画像内のレーザーラインの位置を保持します。複数の抽出モードと各種フィルタがサポートされています。本ソフトウェアのライン抽出機能は、Coaxlink Quad 3D-LLEフレームグラバーのハードウェア実装と完全互換です。
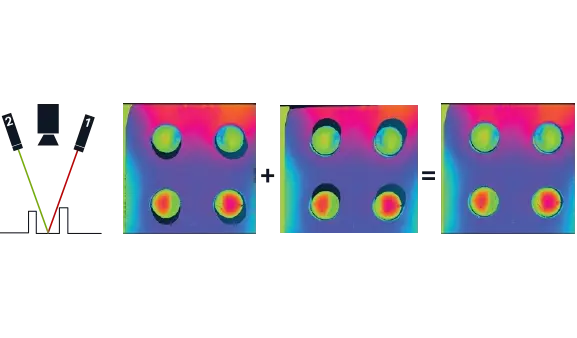
デュアルレーザーライン抽出
ソフトウェアとハードウェアの実装により、デュアルレーザーライン抽出プロセスは遮蔽の影響を低減します。遮蔽は、物体の一部がどのレーザーにも照射されない場合に発生します。異なる角度を持つ2つのレーザーを使用することで、これらの未定義領域を減少させます。Easy3DLaserLineに含まれるオブジェクトベースのキャリブレーションにより、取得したデータを単一のキャリブレーション済み点群に統合することが可能です。
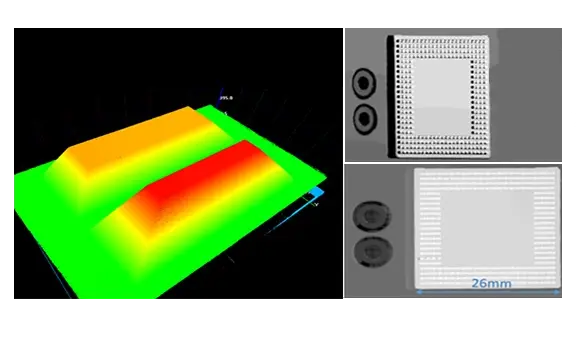
校正
深度マップ上で直接処理を実行できる場合もある。しかし、ほとんどの3D計測では歪みのないデータとメトリック表現が必要であるため、レーザー三角測量装置のキャリブレーションが必須となる。Easy3Dは深度マップに適用するキャリブレーションモデルを計算し、それらをキャリブレーション済み3D点群に変換する。このキャリブレーションモデルは、キャリブレーションが必要なレーザー三角測量装置を用いて取得した基準物体の深度マップに基づいている。
その他の特典
ネオ・ライセンシング・システム
Neoは新しいライセンスシステムです。信頼性が高く、最先端の技術を採用しており、Open eVisionおよびeGrabberのライセンスを保存するために利用可能になりました。Neoでは、ライセンスをNeoドングル上でアクティベートするか、Neoソフトウェアコンテナ内でアクティベートするかを選択できます。ライセンスを購入し、後で決定できます。
Neoドングルは堅牢なハードウェアを提供し、コンピュータ間での転送が可能な柔軟性を備えています。Neoソフトウェアコンテナは専用ハードウェアを必要とせず、代わりにアクティベーションされたコンピュータに紐付けられます。
Neoには専用のNeoライセンスマネージャーが同梱されており、直感的で使いやすいグラフィカルユーザーインターフェースと、Neoライセンス手続きの自動化を容易にするコマンドラインインターフェースの2種類が用意されています。
WindowsおよびLinux向けOpen eVisionライブラリ一式
- Microsoft Windows 11、10 for x86-64 (64ビット) プロセッサアーキテクチャ
- x86_64 システム上の Microsoft Windows 11、10 IoT Enterprise
- Linux for x86-64 (64ビット) および ARMv8-A (64ビット) プロセッサアーキテクチャ(glibc バージョン 2.18 以上)

Open eVision 3D Studio
Open eVision 3D Studioは、Open eVisionの3D評価およびプロトタイピングアプリケーションツールです。Open eVision
3D Studioアプリケーションは、Coaxlink Quad 3D-LLEフレームグラバー、ならびにEasy3DおよびEasy3DLaserLineライブラリを使用した単一およびデュアル3Dレーザーライン検査システムの設定を大幅に簡素化します。
Open eVision 3D Studioは無料で、ライセンスは一切不要です。
Software
- Host PC Operating System
-
Open eVision is a set of 64-bit libraries that require an Intel compatible processor with the SSE4 instruction set or an ARMv8-A compatible processor.
Open eVision can be used on the following operating systems:
Microsoft Windows 11, 10 for x86-64 (64-bit) processor architecture
Microsoft Windows 11, 10 IoT Enterprise for x86-64 systems
Linux for x86-64 (64-bit) and ARMv8-A (64-bit) processor architectures with a glibc version greater or equal to 2.18
Remote connections
Remote connections are allowed using remote desktop, TeamViewer or any other similar software.
Virtual machines
Virtual machines are supported. Microsoft Hyper-V, Oracle VirtualBox and libvirt hypervisors have been successfully tested.
Only the Neo Licensing System is compatible with virtualization.
Minimum requirements:
2 GB RAM to run an Open eVision application
8 GB RAM to compile an Open eVision application
Between 100 MB and 2 GB free hard disk space for libraries, depending on selected options.
- APIs
-
Supported programming languages :
The Open eVision libraries and tools support C++, Python and the programming languages compatible with the .NET (C#, VB.NET)
C++ requirements: A compiler compatible with the C++ 11 standard is required to use Open eVision
Python requirements: Python 3.11 or later is required to use the Python bindings for Open eVision
.NET requirements: .NET framework 4.8 (or later) or the .NET platform 6.0 (or later) are supported
Supported Integrated Development Environments:
Microsoft Visual Studio 2017 (C++, C#, VB .NET, C++/CLI)
Microsoft Visual Studio 2019 (C++, C#, VB .NET, C++/CLI)
Microsoft Visual Studio 2022 (C++, C#, VB .NET, C++/CLI)
QtCreator 4.15 with Qt 5.12
Ordering Information
- Product status
-
Released
- Product code - Description
-
PC4186 Open Easy3DLaserLine for USB dongle
PC4336 Open eVision Easy3DLaserLine
- Included libraries
-
Easy3D
Easy3DLaserLine
- Related products
-
PC1637 Coaxlink Quad 3D-LLE
PC6512 eVision/Open eVision USB Dongle (empty)
PC6514 Neo USB Dongle (empty)